Varkon MBS Programmers manual
Low level routine to create a user defined coordinate system by specifying 16 values orderd in a 4 by 4 matrix. The coordinate system created is based on (relative to) the currently active coordinate system.
The matrix supplied is inverted and multiplied with the matrix of the currently active coordinate system before it is stored in the database. This means that the matrix that is returned if you fetch the coordinate system from the database is not the same as the matrix you initially supplied. See the figure below.
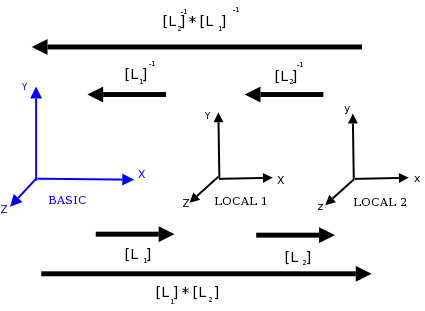
Transformation matrices order from BASIC to LOCAL and vice versa
The coordinate system represented by 4x4 matrix like:
| Xx | Xy | Xz | Ox |
| Yx | Yy | Yz | Oy |
| Zx | Zy | Zz | OZ |
| 0 | 0 | 0 | 1 |
Where:
| Xx, Yx, Zx | => | X-axis direction vector |
| Xy, Yy, Zy | => | Y-axis direction vector |
| Xz, Yz, Zz | => | Z-axis direction vector |
| Ox, Oy, Oz | => | Origin position |
csys_usrdef(id, name,tmat:attributes);
| REF | id; |
| STRING | name*10; |
| FLOAT | tmat(4,4); |
| id | - Local identity |
| name | - User defined name |
| tmat | - 4 by 4 transformation matrix |
None.
| PEN | - Pen or colour number |
| LEVEL | - Level number |
| BLANK | - Visible(0) or invisible(1) |
tmat(1,1):=1.0; tmat(1,2):=0.0; tmat(1,3):=0.0; tmat(1,4):=0.0; tmat(2,1):=0.0; tmat(2,2):=1.0; tmat(2,3):=0.0; tmat(2,4):=0.0; tmat(3,1):=0.0; tmat(3,2):=0.0; tmat(3,3):=1.0; tmat(3,4):=0.0; tmat(4,1):=0.0; tmat(4,2):=0.0; tmat(4,3):=0.0; tmat(4,4):=1.0; csys_usrdef(#1,"Origin",tmat);
Creates a coordinate system equal to the basic coordinate system.
Directions of axes are represented by the three direction vectors in the matrix, therefore they should be perpendicular to each other, otherwise an error message will be generated.
Varkon 1.19D svn # 120M